|
|
Физика - одна из самых удивительных наук! Физика столь интенсивно развивается, что даже лучшие педагоги сталкиваются с большими трудностями, когда им надо рассказать о современной науке. Данный ресурс поможет эффективно и интересно изучать физику. Учите физику! |
|||
| полезное |
|---|
| Смешные анекдоты о физике
Готовые шпоры по физике Физика в жизни Ученые и деньги Нобелевские лауреаты Фото Видео Карта сайта |
| На заметку |
|---|
| Если вам понравился сайт, предлагаем разместить нашу кнопку |
| Дополнительно |
|---|
|
Компьютерные программы по физике 
Физика и юмор 
Онлайн тестирование по физике 
|
Матрица поворота для произвольного спина Сейчас, я надеюсь, вам уже ясно, как важно представление о моменте количества движения для понимания атомных процессов. До сих пор мы рассматривали только системы со спинами (или «полными моментами количества движения») 0, 1/2 и 1. Но бывают, конечно, и атомные системы с большими моментами количества движения. Для анализа таких систем нужны такие же таблицы амплитуд поворота, какие мы привели в гл. 15, § 6. Иными словами, нужна матрица амплитуд для спина 3/2, 2, 5/2, 3 и т. д. Мы не будем подробно рассчитывать эти таблицы, но хотели бы показать, как это делается, чтобы вы, если понадобится, могли сами это проделать.
или, если вам больше нравится,
(где δm,m′ равно единице при т′ = т, и нулю в прочих случаях).
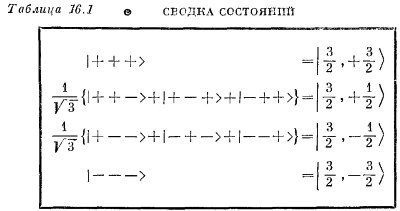
Ясно, что состояние | +++ > — это как раз то, что мы называем состоянием т = +3/2, или состоянием | 3/2, + 3/2 >.
где множитель 1/√3 поставлен для нормировки. Если мы повернем это состояние вокруг оси z, то получим множитель eiφ/2 для каждого плюса и e–iφ/2 для каждого минуса. Каждое слагаемое в (16.27) умножится на eiφ/2, и общий множитель eiφ/2 мы вынесем за скобки. Такое состояние соответствует нашему представлению о состоянии с т = +1/2; мы приходим к выводу, что
что соответствует состоянию с т = — 1/2. Заметьте, что мы берем только симметричные сочетания, у нас нет комбинаций, куда входят слагаемые со знаком минус. Они отвечали бы состояниям с таким же т, но с иным j. Это аналогично случаю спина 1, где (1/√2) { | + – >+ | – +>} было состоянием | 1,0 >, а (1/√2) {| + – >– | – +>} было состоянием | 0,0>. Наконец, мы имеем
Эта четверка состояний сведена в табл. 16.1.
Все, что нам теперь нужно сделать, это взять каждое состояние, повернуть его вокруг оси у и посмотреть, сколько новых состояний оно создаст — пользуясь известной нам матрицей поворота для частицы спина 1/2. Можно поступать так же, как мы это делали в случае спина 1 [см. гл. 10, § 6 (вып. 8)]. (Только алгебры будет побольше.) Мы будем строго следовать идеям гл.10 (вып. 8), так что подробных объяснений давать не будем. Состояния в системе S будут обозначаться
и т. д.; Т-системой будет считаться система, повернутая вокруг оси у системы S на угол θ. Состояния в T-системе будут обозначаться | 3/2, + 3/2, T>, |3/2, + 1/2, T> и т.д. Ясно,что | 3/2, + 3/2, T> это то же самое, что | +′ +′ +′> (штрихи всегда относятся к T-системе). Точно так же |3/2, + 1/2, T> будет равняться
и т. д. Каждое |+′>-состояние в T-системе получается как из | +>-, так и из | – >-состояний в системе S с помощью матричных элементов из табл. 10.4 (вып. 8, стр. 267).
Пользуясь обозначениями табл. 10.4, получим вместо (10.48) уравнение
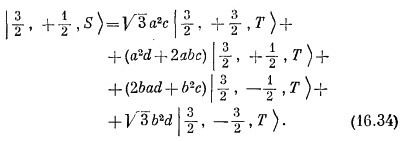
Это уже дает нам некоторые из наших матричных элементов <jT | iS>. Чтобы получить выражение для |3/2, + 1/2, S>, мы должны исходить из преобразования состояния с двумя плюсами и одним минусом. К примеру,
Добавляя два сходных выражения для |+ –+> и |– + +> и деля на √3, найдем
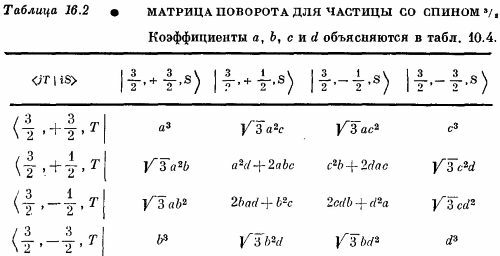
Продолжая этот процесс, мы найдем все элементы <jT |iS> матрицы преобразования. Они приведены в табл. 16.2. Первый столбец получается из (16.32), второй — из (16.34). Последние два столбца были вычислены таким же способом.
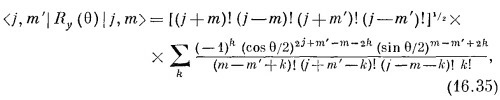
Рассуждения, которые мы только что провели, были обобщены на систему с произвольным спином j. Состояния | j, m> можно составить из 2j частиц со спином 1/2 у каждой. (Из них j+m будут в | + >-состоянии, а j — m будут в |—>-состоянии.) Проводится суммирование по всем возможным способам, какими их можно сочетать, а затем состояния нормируются умножением на надлежащую постоянную. Если у вас есть способности к математике, то вы сможете доказать, что получается следующий результат:
где k пробегает все те значения, при которых под знаком факториала получаются неотрицательные величины.
Первые из них таковы:
СМОТРИТЕ ТАКЖЕ:Социальные комментарии Cackle |













При использовании материалов сайта ссылка на www.all-fizika.com обязательна.